산업용 로봇
산업용 로봇은 팔레타이징, 실링, 용접, 머신 텐딩, 프레스 간 핸들링, 검사, 사출/성형 취출,제련 등에서 사용된다.
툴(Tool) : 로봇이 작업을 할 때 작업 대상에 직접 작용하는 기능을 가진 부분으로 목적에 맞게 장착할 수 있다.

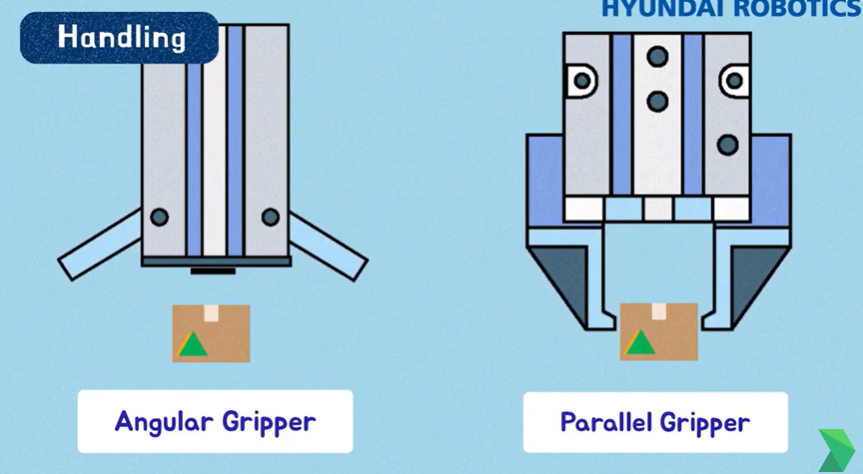
핸들링: 대상에 직접 접촉하여 이송 및 조립을 행하는 로봇의 기능 중 하나이다. 그리퍼(Gripper)라는 툴을 사용한다.
그리퍼 중 물체를 붙잡게 하기 위한 부품은 Jaw라고 한다.
Parallel Gripper(평행 그리퍼) : 쥐게되는 물체에 평행하게 열리고 닫혀 가장 폭넓게 사용된다. 사용법이 간단하고 일축 치수의 보상이 가능하기 때문이다.
Angular Gripper(각도 그리퍼) : Jaw가 중앙 축을 중심으로 아치형으로 열리고 닫힌다.
3-Jaw Gripper : 3축을 이용한 그리퍼
Vacuum Gripper : 진공을 이용한 그리퍼
Magnetic Gripper : 자력을 이용한 그리퍼

Handling은 입체인식, 이동인식, 사물관련 추리가 발전함에 따라 응용분야가 다양해지고 있다.
Spot Welding : 강력한 전압 인가로 열과 압력을 가해 용접하는 방식이다.
Arc Welding : 공기의 방전현상을 이용해 금속끼리 접합하는 방식. 고온 작업이므로 로봇을 사용해 인명피해를 예방할 수 있다.
Painting : 균일한 도장이 가능핟.
산업 로봇 사용 이유
1. 안전
2. 불량률 최소
3. 원가 절감
4. 고정밀 작업
5. 균일품질
https://www.youtube.com/watch?v=0-yB8lrWlcA&list=PL2pSEA-GoYRKa_4fpbiXBjYDk1kVsqPxp&index=4
협동 로봇
COBOT(Collaborative Robot) : 사람과 직접 협업하는 로봇으로 사람과 같은 영역에서 작업하는 로봇이다.

협동로봇으로 인정받기 위해서는 ISO/TS15066 기준을 만족해야 한다.
1. 안전 정격 감시 정지 : 사람이 접근 시 로봇은 정지해야 한다.
2. 핸드 가이딩 : 작업자의 접촉에 주어지는 힘에 의해서만 움직여야 한다.
3. 속도 및 위치 감시 : 로봇과 사람사이의 간격이 안전거리일 때만 움직여야 한다.
4. 동력 및 힘 제한 : 접촉사고 발생 시 제한된 크기의 힘만을 전달하여 사고를 예방해야 한다.
5. 시각적 표시 : 작업 시 로봇이 작업 중이라는 시각적 표시가 있어야 한다.
협동로봇 사용이유
1. 비용 절감 - 안전 펜스가 필요 없어 공장 내 배치가 자유로움
2. 직접 교시 - 시운전이 용이하다. 전문적인 지식 없이 직관적인 운용이 가능하다.
3. 안전사고 감소 - 정밀한 힘제어가 가능해 사고를 예방할 수 있다.
현대로보틱스의 기구적 특성
1. 토크 센서 : 토크 센서를 통해 정교한 좌표값을 통한 안정성 & 힘 제어력 상승
2. 서보드라이버 모듈 : 일반적인 산업로봇은 제어기에 서보드라이버 모듈이 있지만 협동로봇은 각 관절마다 서보 드라이버 모듈이 있어 이중으로 위치 값을 계산해 안전성을 높였다.
3. 사용자 편의성 향상 : 케이블을 내부에 내장하여 사용자 편의성을 높였다.
4. 간편한 A/S : 모듈 형식으로 제작하여 쉬운 교체가 가능하다.
5. 고용량 파워 : 고용량 컴퓨팅 파워를 가지고 있다.
6. 우수한 디자인 : 인체공학적 디자인으로 레드닷 워어드에서 수상하기도 하였다.
https://youtu.be/klQfz06I_Z4?list=PL2pSEA-GoYRKa_4fpbiXBjYDk1kVsqPxp
모바일 서비스 로봇
Mobile Service Robot은 사람의 도움 없이 특정 공간에서 이동하고 행동하여 부가가치를 창출하는 로봇을 말한다. 모바일은 자율주행을 의미하고 서비스는 서비스를 담당하는 부분을 의미한다.
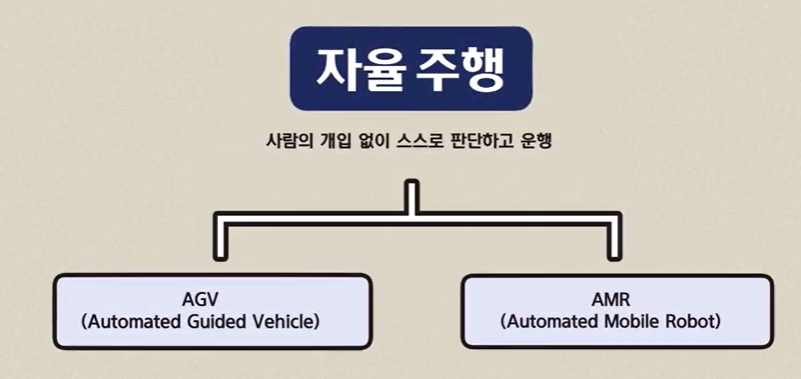
자율주행
사람의 개입 없이 스스로 판단하고 운행
AGV(Automated Guided Vehicle) : QR코드, 고무 자석, 레일 등의 경로에 따라 자율 주행하는 것
AMR(Automated Mobile Robot) : 정해진 경로가 없이 경로를 생성하며 자율주행을 하는 것
자율주행을 위해서는 카메라, 센서, 라이더, 모터, 배터리, IMU(관성측정장치)이 필요하다.

소프트웨어 기술
SLAM(Simultaneous Location And Mapping) : 로봇이 자신의 위치를 인지하고 획득한 정보룰 이용하여 지도를 작성하는 기술
Path Planing : 목적지까지 가기 위해 어떠한 경로로 주행할 것인지 경로 생성을 담당하는 기술
Multi Robot System : 다수의 로봇을 제어하기 위한 기술
https://www.youtube.com/watch?v=axxP4HsR3vU&list=PL2pSEA-GoYRKa_4fpbiXBjYDk1kVsqPxp&index=14
'취업 > 면접후기' 카테고리의 다른 글
| LIG넥스원 기업 분석 (면접 준비) (0) | 2023.03.30 |
|---|---|
| 현대로보틱스 면접 후기 (1) | 2023.02.28 |
| [현대로보틱스 면접 준비 3] 로봇의 구조 (0) | 2023.02.15 |
| [현대로보틱스 면접 준비 2] 로봇의 역사 (0) | 2023.02.15 |
| [현대로보틱스 면접 준비 1] 기업 분석 (1) | 2023.02.15 |




댓글