로봇의 구조
로봇의 구조는 크게 하드웨어와 소프트웨어로 나누어진다.
하드웨어는 본체와 제어기로 구성되어 있고, 소프트웨어는 제어기술로 구성되어 있다.
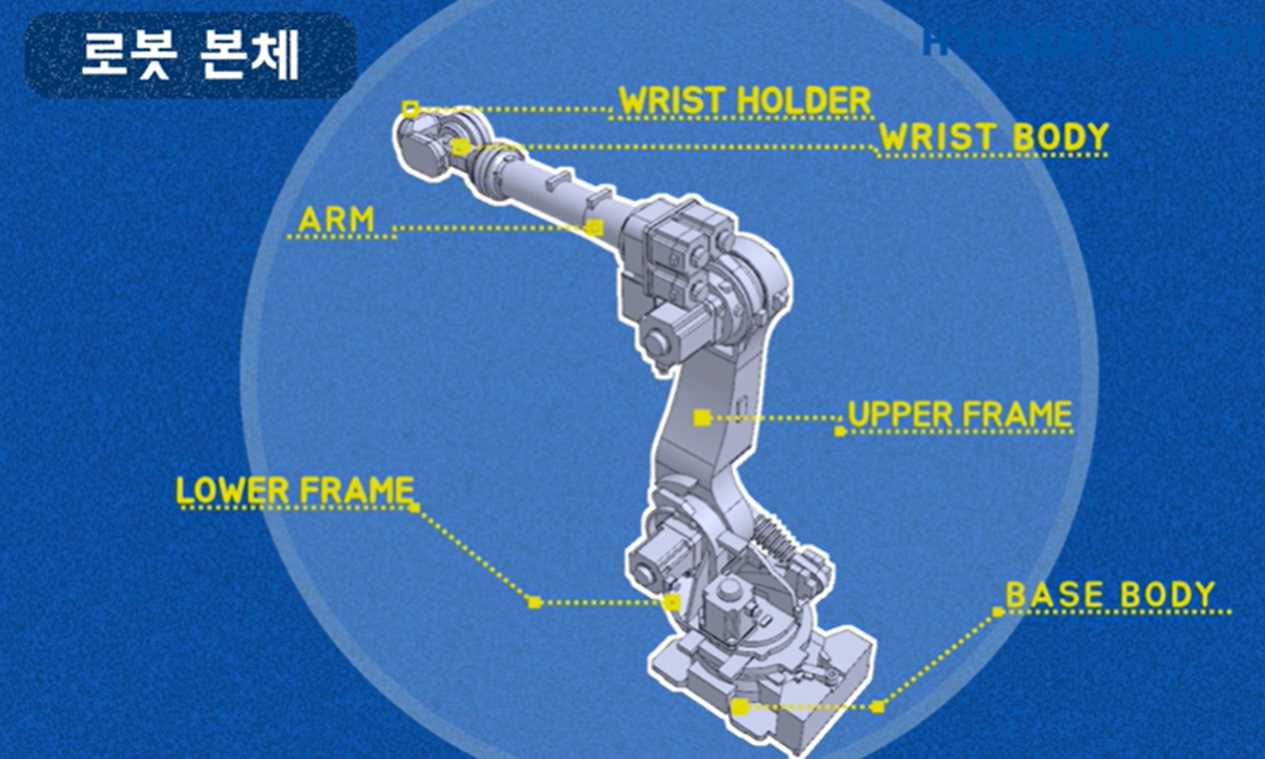
본체
ARM, WRIST HOLDER, WRIST BODY, UPPER FRAME, LOWER FRAME, BASE BODY, 서보모터, 감속기 등으로 구성되어 있다.
서보모터 : 동령원으로 토크를 발생시킨다. 동력속도와 가반하중(Payload)에 영향을 주는 부품이다. 그래서 고속 고토크를 발생시키기 위해 네오디뮴 자석을 활용해 모터를 제작한다.
감속기 : 감속기는 동력전달 매체의 역할을 수행한다. 산업로봇의 반복정밀도는 0.0254mm 이내의 공차를 보여야 하므로 감속비를 높여 정밀도를 높일 수 있는 감속기가 서보모터에 연결되어 사용된다.
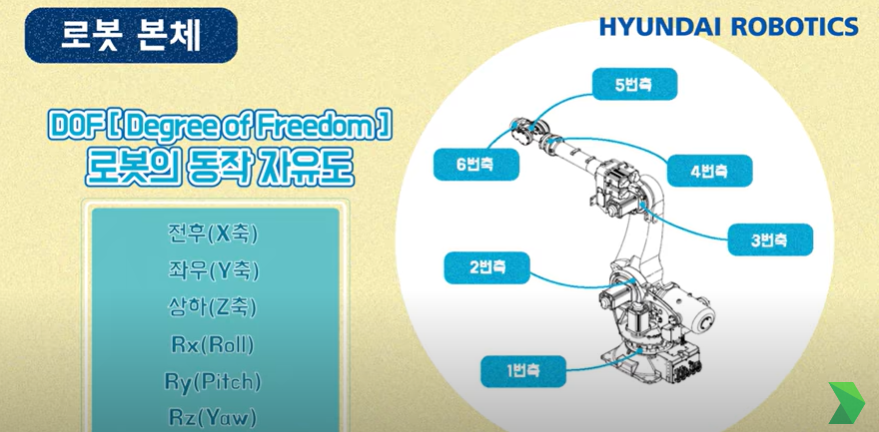
현대로보틱스의 산업용 로봇은 링크마다 서보모터와 감속기가 설치되어 있다. 만약 각 링크마다 6개의 서보모터와 감속기가 있다면 x, y, z 축과 Rx, Ry, Rz 운동을 하는 6자유도를 갖는 로봇이 구성된다.
제어기
로봇 본체의 행동 명령을 전달하고 전원을 각 모듈에 공급하는 장치이다. 계산, 명령전달, 에너지 조절을 담당한다.
전원모듈(SMPS) : 에너지를 전달하는 전원모듈, 전장품에 에너지를 공급한다.
CPU모듈 : 로봇의 동작 제어의 명령을 전달한다.
서보 드라이버 모듈 : 전류를 제어하여 로봇의 각 관절이 동작할 수 있도록 한다.
시퀀스 모듈 : 긴급상황시 로봇을 제어한다.
입출력 모듈 : 주위 환경과의 인터페이스를 담당하고 있다.
와이어 하네스 : 전선과 신호장치를 묶은 배선장치로 로봇과 제어기를 연결하는 역할을 한다.
와이어 하네스의 선 종류에는 정보 전달을 담당하는 EtherCAT과 CAN comm이 있고 전원을 연결하는 DC cable이 있다.

제어기술
로봇을 용도에 맞춰 빠르고 정확하게 동작시키는 소포트웨어 기술이다.
사용자 인터페이스에는 디스플레이에 로봇 동작과 제어에 관한 정보를 보여주는 티칭 펜던트와 같은 기술이 있다.

로봇 경로와 속도 계산을 위해 서보모터의 위치를 이용하여 로봇의 위치와 자세를 계산한다. 이때 하중과 관성의 크기를 가지고 모터에 필요한 동력을 계산한다.

최근에는 머신러닝으로 사물을 인지하는 영역도 제어기술 중 중요한 기술 영역에 들어왔다.
https://www.youtube.com/watch?v=_4XIpv0S_ts&list=PL2pSEA-GoYRKa_4fpbiXBjYDk1kVsqPxp&index=5
'취업 > 면접후기' 카테고리의 다른 글
| 현대로보틱스 면접 후기 (1) | 2023.02.28 |
|---|---|
| [현대로보틱스 면접 준비 4] 산업용 로봇, 협동로봇, 모바일 서비스 로봇 (0) | 2023.02.15 |
| [현대로보틱스 면접 준비 2] 로봇의 역사 (0) | 2023.02.15 |
| [현대로보틱스 면접 준비 1] 기업 분석 (1) | 2023.02.15 |
| 현대 모비스 면접 준비 5-2 (생산 제품 정리) (2) | 2023.01.09 |




댓글